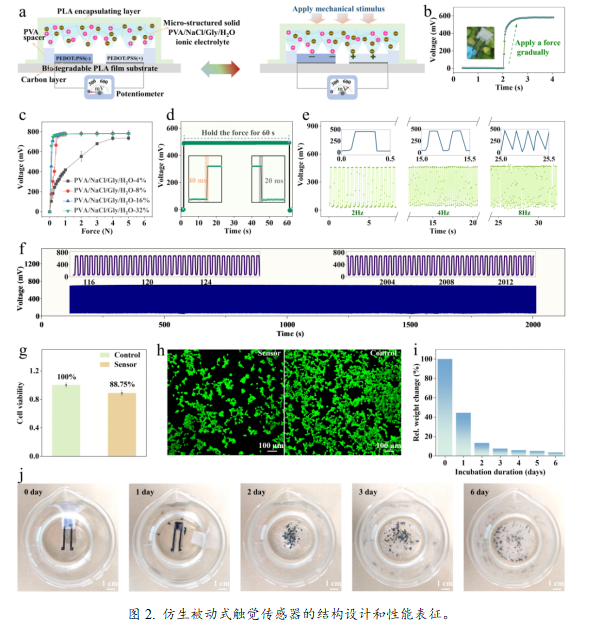
近日,我校机械工程学院吴晓东研究员团队巧妙利用共轭聚合物材料的可逆极化特性,模拟了天然感知细胞的极化过程,提出一种新型仿生被动式触觉传感原理和传感器件,可用于静态和动态刺激的无源式检测。该触觉传感器具有灵敏度高(773 mV·N-1)、功耗超低(nW级别)和生物/环境友好等特性。相关成果以“Bioinspired Passive Tactile Sensors Enabled by Reversible Polarization of Conjugated Polymers” 为题,发表在《Nano-Micro Letters》期刊上(影响因子:31.6,1区Top期刊),我校硕士研究生何锋为该论文唯一第一作者,吴晓东研究员为论文通讯作者,四川大学机械工程学院为第一完成单位。
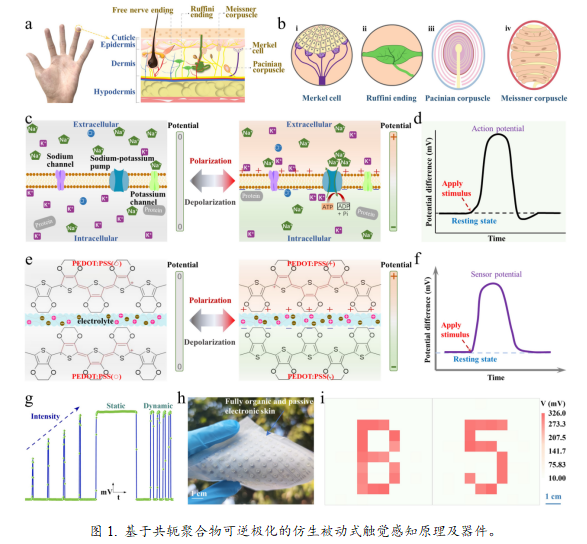
仿生触觉传感器是未来智能假肢和智能机器人的必要组件。现有主动式触觉传感器能耗较高,单个器件功耗可达微瓦甚至毫瓦,限制了其应用范围。相比之下,无源式触觉传感器无需外部能量供应,因此功耗较低;然而,大部分被动式触觉传感器只对动态机械刺激产生响应,而无法监测静态机械刺激。因此,设计和构建能够检测静态刺激的被动式触觉传感器及电子皮肤,是仿生触觉传感领域需要解决的问题之一。
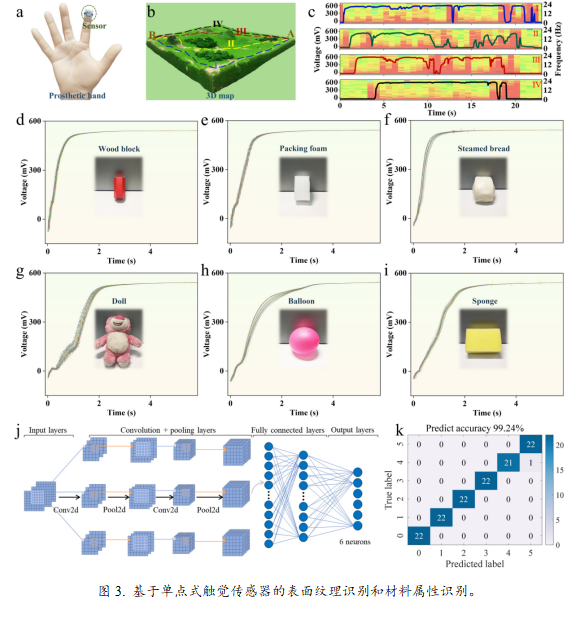
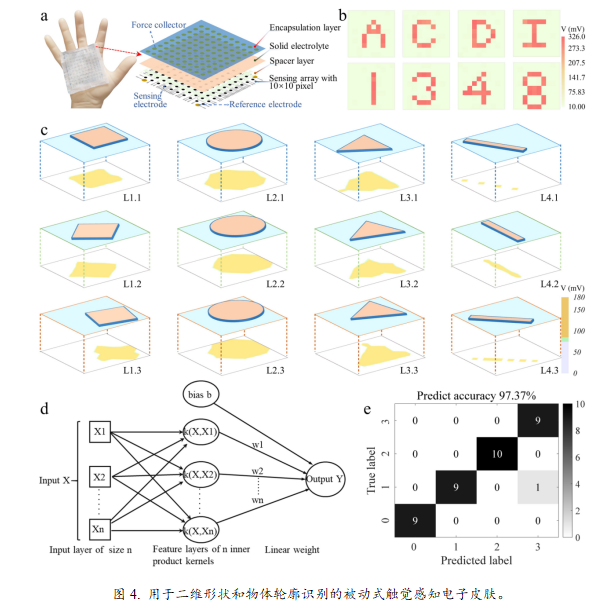
该论文借助人工智能算法,利用该新型触觉传感器成功实现了高准确度的单点触觉感知(如表面纹理识别、材料属性感知等)和二维触觉感知(如物体形状和轮廓识别),准确率高达97.4%。该种仿生触觉传感器的设计理念和构建方法为机器人触觉皮肤、人工智能假肢等领域提供了新的理论参考和技术借鉴。
论文链接:https://link.springer.com/article/10.1007/s40820-024-01532-z









